
OPPO ColorOS 全球创客大赛启动,助力全球泛在服务生态发展
北京时间 7 月 11 日,以“潘塔纳尔:泛在服务,智慧生活”为主题的 2023 OPPO ColorOS 全球创客大赛正式启动,围绕生活服务、出行服务和休闲娱乐等场景,鼓励全球开发者集成潘塔纳尔开放能力,为全球超 5 亿的 ColorOS 用户共创智慧生活体验。

不断开放的潘塔纳尔生态,正召集东南亚开发者
潘塔纳尔系统发布以来,已与 21 家生态伙伴达成合作,包括国内的美团、百度地图、航旅纵横、小红书,海外的 Snapchat、Spotify、Zamato、Swiggy 等行业头部企业。其中,4 个生态合作伙伴达成战略合作,场景涵盖生活服务、出行、娱乐、办公等领域,超过 30 万+开发者参与为潘塔纳尔生态建设做贡献。
作为“潘塔纳尔“创新生态建设的组成部分之一,第三届 OPPO ColorOS 全球创客大赛也在 7 月 11 日正式面向全球开启报名,持续至 9 月 15 日结束报名。本届大赛将重点面向东南亚地区,旨在寻找当地生活服务、出行服务和休闲娱乐等场景下的服务提供商或开发者,鼓励他们通过学习潘塔纳尔系统,开发相关场景下的智慧服务,进行场景方案构思和交互形式设计,从而探索出符合东南亚本地市场的服务形态。
一站式开发者赋能体系,多维度提升开发效率
除了延续过往两届赛事奖金制度以外,此次大赛也将开放潘塔纳尔系统相应的技术能力和潘塔纳尔开发者套件,包括开发框架、开发者IDE及配套指南,助力开发者快速低成本实现跨端服务开发。
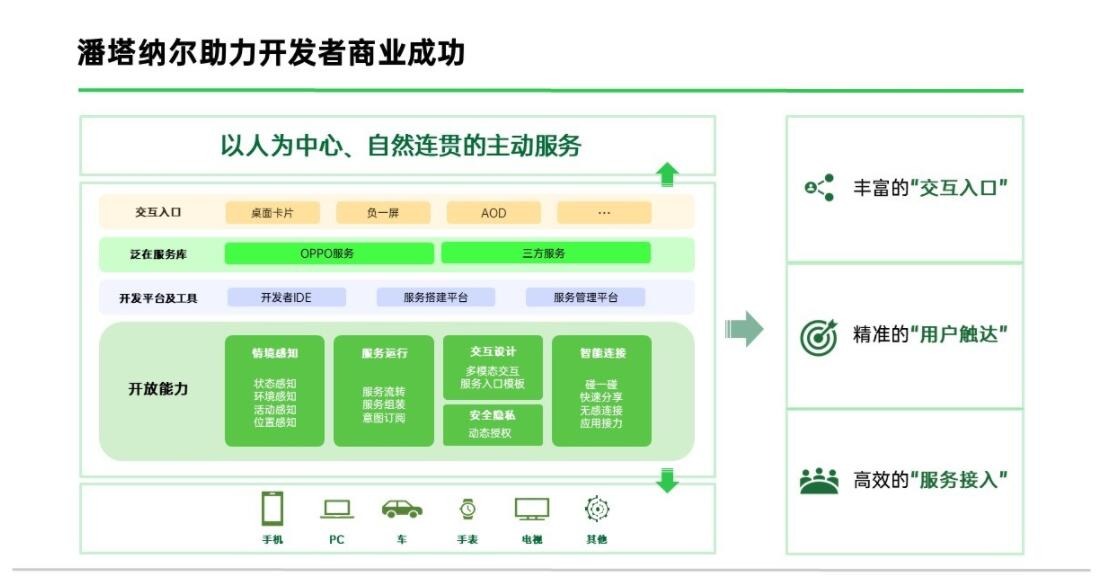
目前,潘塔纳尔已对外提供包含情境感知、服务运行、自然交互等在内的多项开放能力,开发者能通过潘塔纳尔开发框架调用能力,将复杂的跨端多服务入口协同封装成简单的接口,实现一次开发,多端多入口快速适配的特性,满足开发者在一端开发,多端复用的开发诉求,保障开发者在一个应用中不用付出高成本与精力,去适配多个平台生态。
全新的潘塔纳尔开发者 IDE 整合了潘塔纳尔相关模块的集成开发环境,提供了多个业务模块选择,显著地为开发者降本提效。同时,还实现了跨平台一致渲染,多入口、跨设备实时预览,使开发者能快速获取与验证成果。
在本次 OPPO ColorOS 全球创客大赛上,开发者也将能抢先体验到这些潘塔纳尔开放能力和开发者套件,大大地提升开发效率,预计单人开发者最快 3 天可以完成开发服务,30 天完成端到端服务上传。
此外,为了解答开发者对赛事的疑惑,以及如何利用潘塔纳尔系统开放能力、开发者 IDE 进行开发等问题,OPPO ColorOS 还安排了线上赛事说明会和线上沙龙进行答疑和讲解。进入决赛轮的真机调试阶段,参赛者还将直接获得 OPPO 技术团队的技术支持。大赛还邀请了 OPPO 专家及东南亚当地的行业专家亲临决赛现场,给出专业的指导和建议。值得注意的是,最终的获奖作品也将有机会获得 OPPO 应用商店的激励扶持。
与此同时,OPPO ColorOS 也向参与潘塔纳尔生态建设的开发者提供了全方位支持,包括为开发者提供 全年持续开发者直播 Otalk、组建开发者社区、开展沙龙活动及在开放平台官网上专门设置开发者学堂板块等,接下来也将会陆续上线更多面向开发者的沙龙活动、直播及培训课件。

加入 OPPO ColorOS 全球创客大赛,共创以人为中心的万物互融生态
万物互融时代趋势下,OPPO ColorOS 希望以全球创客大赛为契机,未来将进一步加强对东南亚开发者的支持,降低开发门槛,优化培训体系,帮助全球优秀创客顺利开展项目,打造更开放、有生命力的潘塔纳尔生态,从而为全球超过 5 亿的 ColorOS 用户的智慧生活体验创造更多可能。
来源:业界供稿
好文章,需要你的鼓励



Queen‘s大学重磅研究:程序员的角色即将彻底改变,从码农到智能体指挥官
Queen's大学研究团队提出结构化智能体软件工程框架SASE,重新定义人机协作模式。该框架将程序员角色从代码编写者转变为AI团队指挥者,建立双向咨询机制和标准化文档系统,解决AI编程中的质量控制难题,为软件工程向智能化协作时代转型提供系统性解决方案。

苹果发布 iOS 26.0.1 系统更新,修复多项关键问题
苹果在iOS 26公开发布两周后推出首个修复更新iOS 26.0.1,建议所有用户安装。由于重大版本发布通常伴随漏洞,许多用户此前选择安装iOS 18.7。尽管iOS 26经过数月测试,但更大用户基数能发现更多问题。新版本与iPhone 17等新机型同期发布,测试范围此前受限。预计苹果将继续发布后续修复版本。

医疗AI的“显微镜革命“:西北工业大学团队发布首个超声影像专用智能助手EchoVLM
西北工业大学与中山大学合作开发了首个超声专用AI视觉语言模型EchoVLM,通过收集15家医院20万病例和147万超声图像,采用专家混合架构,实现了比通用AI模型准确率提升10分以上的突破。该系统能自动生成超声报告、进行诊断分析和回答专业问题,为医生提供智能辅助,推动医疗AI向专业化发展。
2023
07/11
15:35
分享
点赞

业界首款符合AEC-Q200标准额定电压高达1,000 VDC高压保险丝
数据中心的智算挑战,英特尔要如何应对?
下一代智能工厂怎么建?开放自动化给出“解题思路”
跟随西门子,在工博会感受沉浸式的工业AI体验
苹果发布 iOS 26.0.1 系统更新,修复多项关键问题
OpenAI将发布类似TikTok的社交应用,搭配Sora 2视频模型
微软推出Office智能体模式让用户"氛围办公"
AI助手现在能帮你创建高质量Word文档和Excel表格
高通新一代骁龙平台将推动智能体AI时代到来
SAPx阿里云,开启一条通往中国市场与全球化发展的全新路径
微软推出"氛围工作"模式,为Office套件加入AI智能体
OpenAI推出智能购物系统挑战谷歌亚马逊
